



















我们的工作时间是工作日9:00~17:30
期待与您沟通并提供您所需的支持或方案,谢谢!


 体验自动飞行场景三维互动
体验自动飞行场景三维互动
500
+
系统交付数量
440,000
+
飞行作业小时
29
个
省级行政区域
23
+
应用场景
自动飞行赋能行业生产力,体验更智能、更便捷的无人机自动飞行系统!
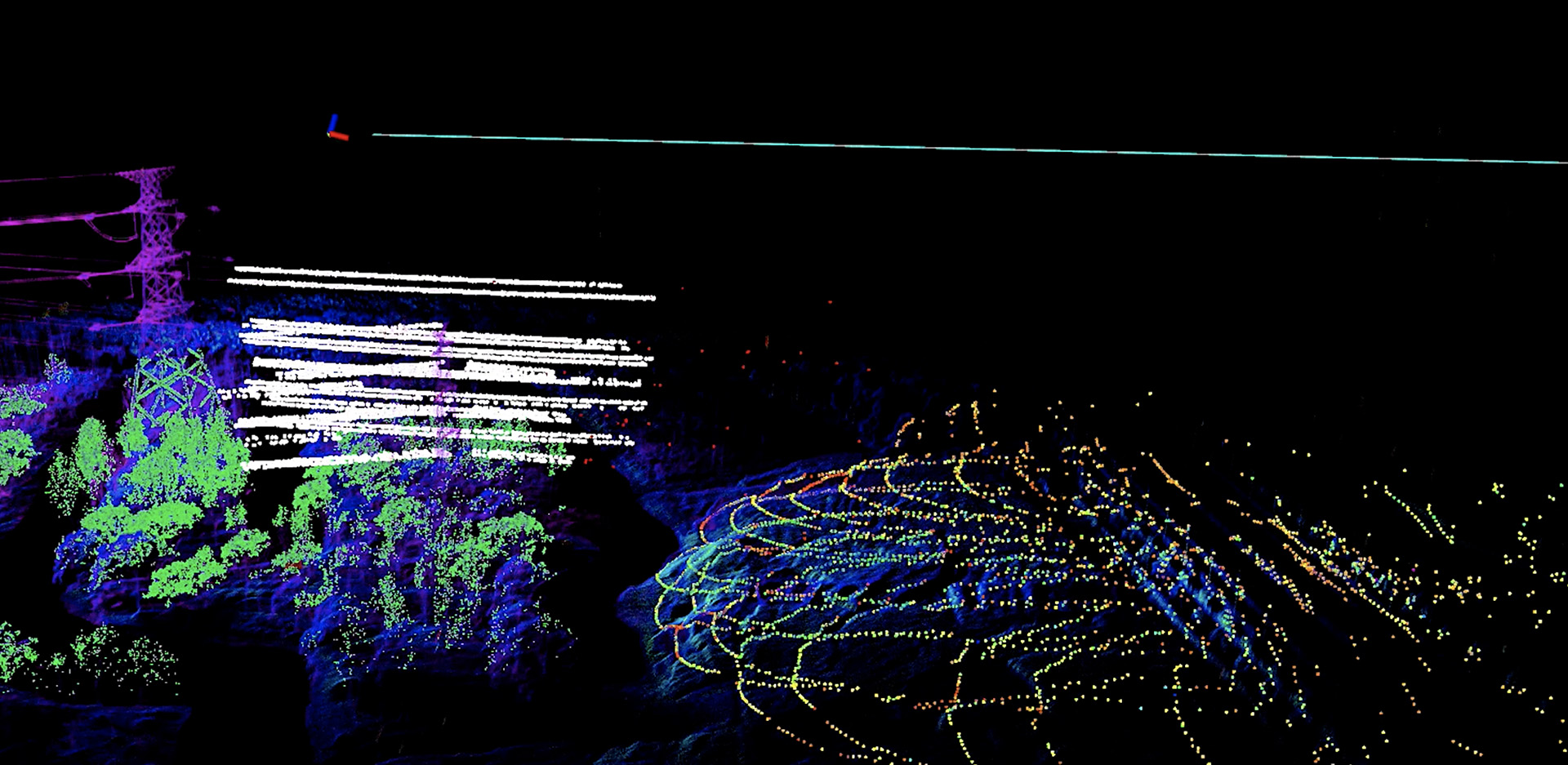
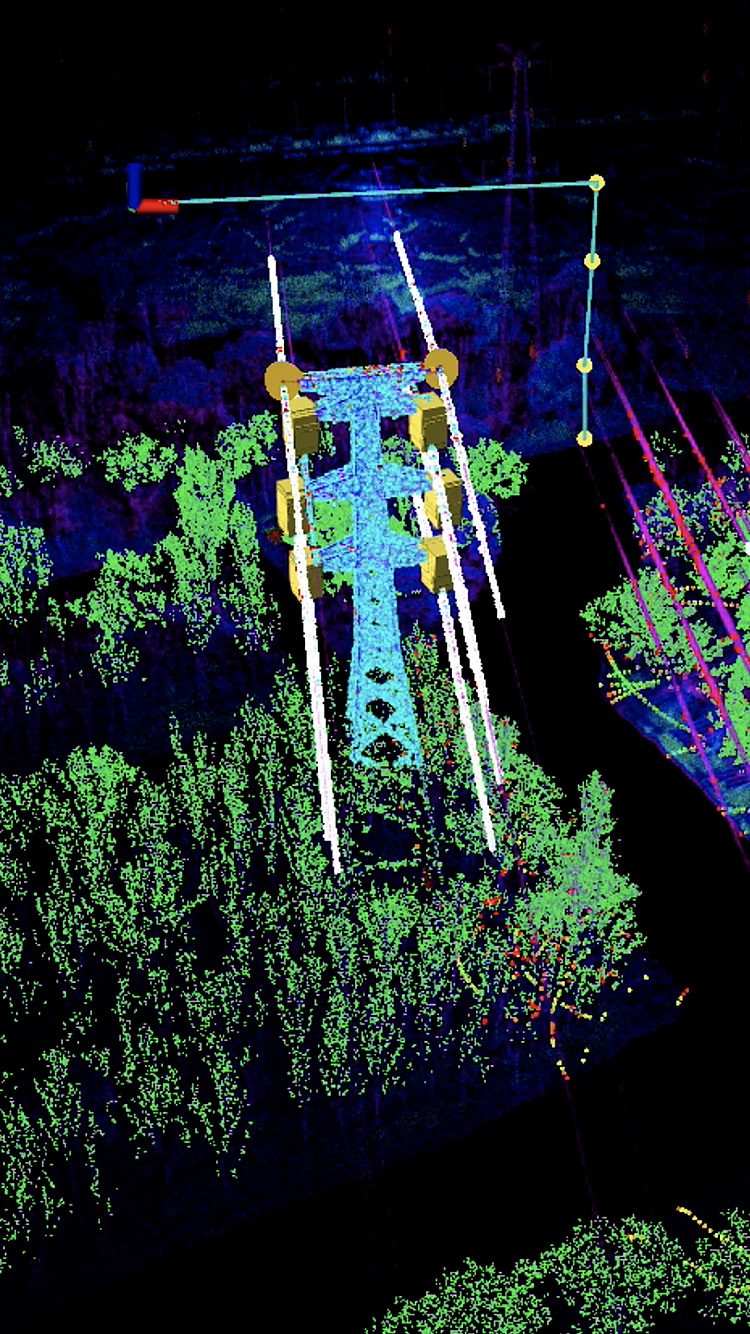
获取方案为了让无人机知道目标在哪?是什么?要做什么?




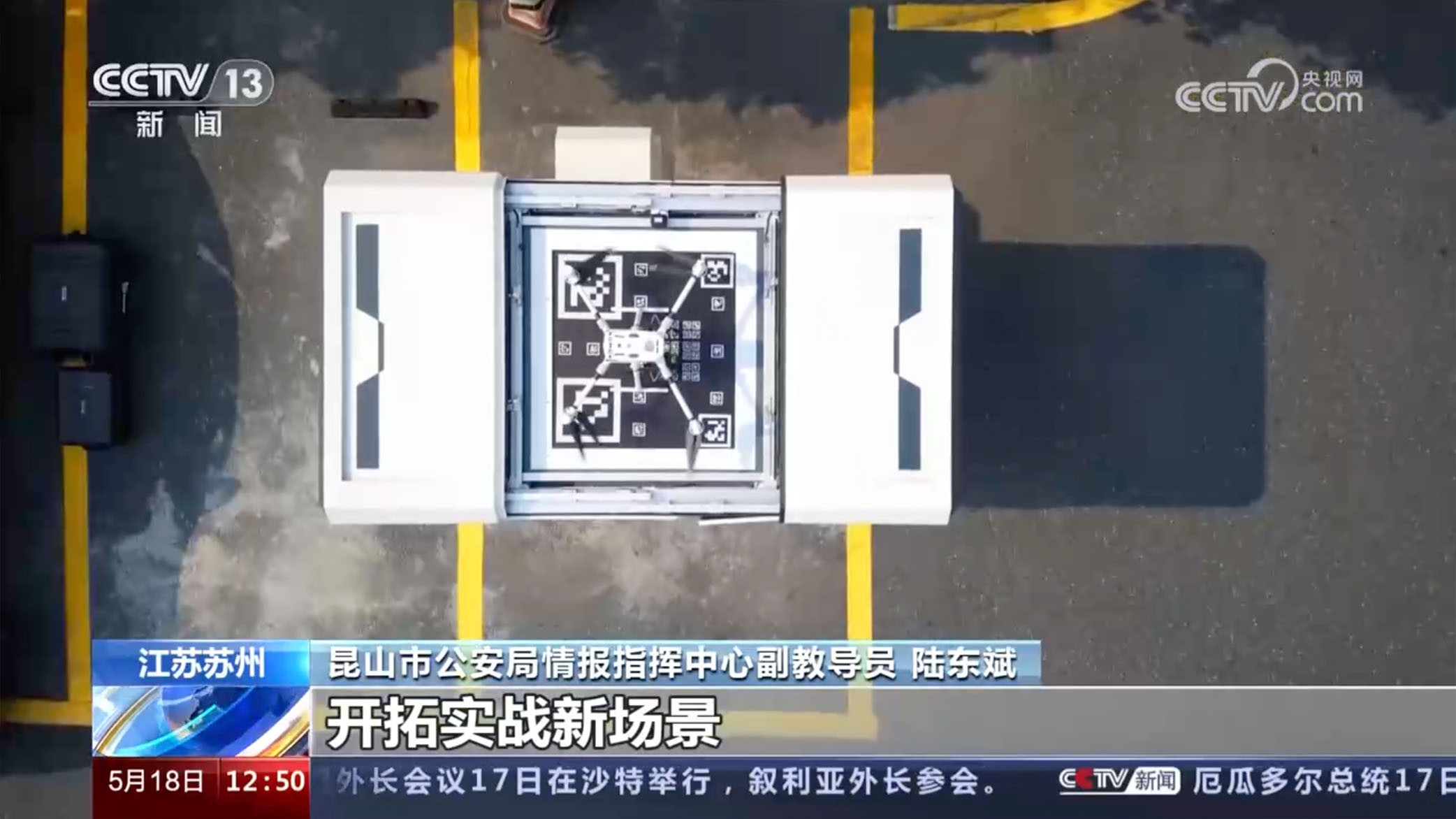
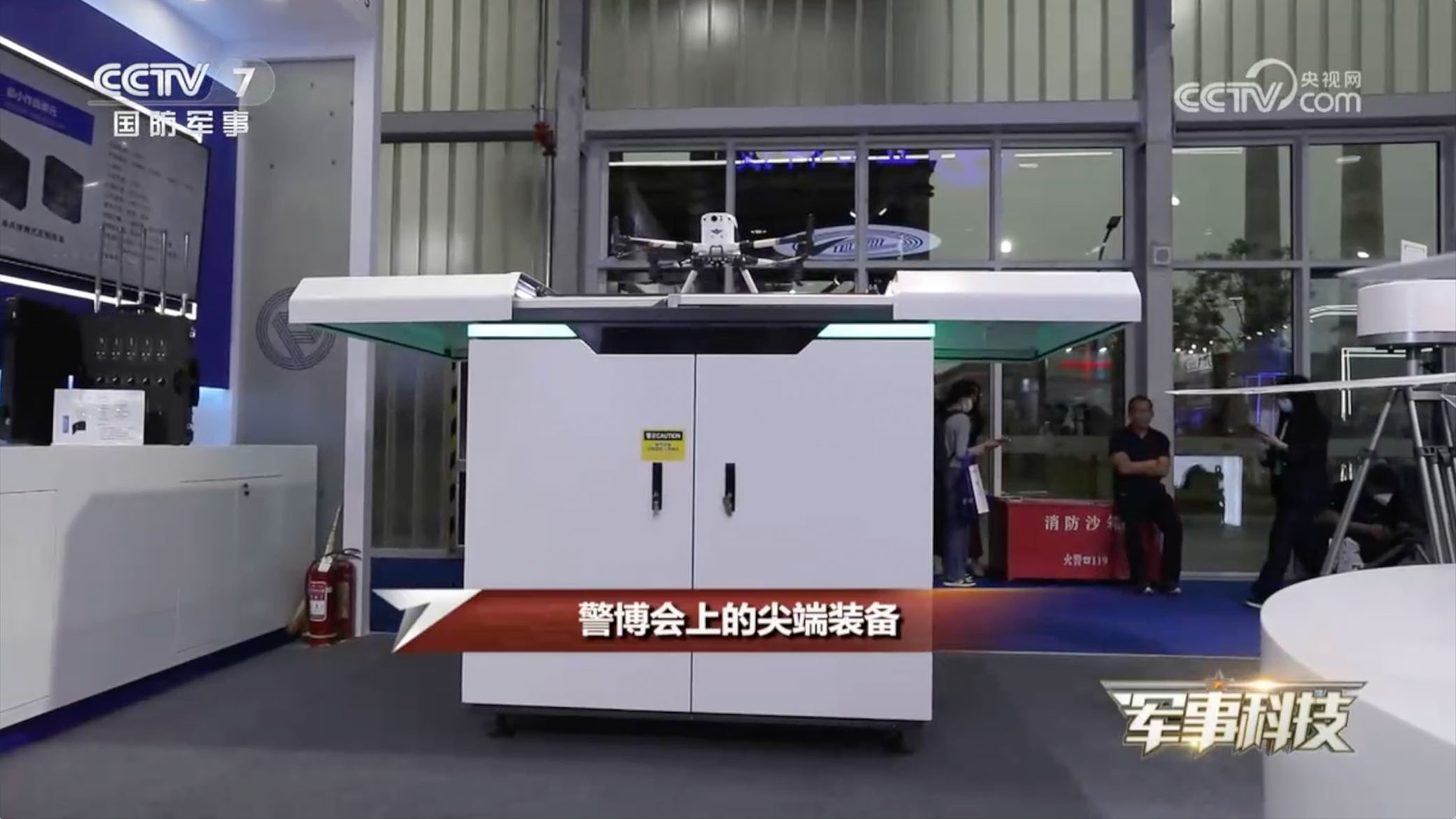
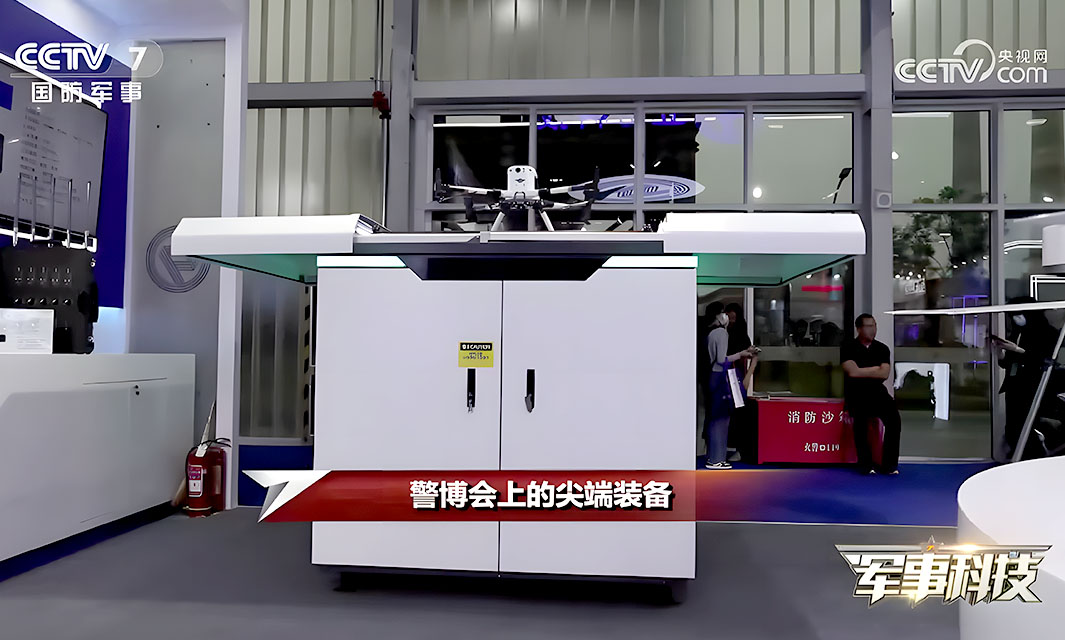
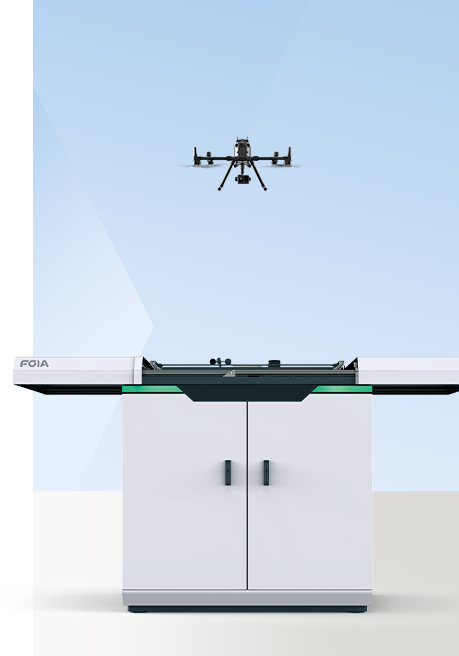
轻客指挥车装载4架智能无人机,打造多用途的无人机移动指挥系统适用于多种 巡逻巡检、应急指挥作业场景。

更多新闻




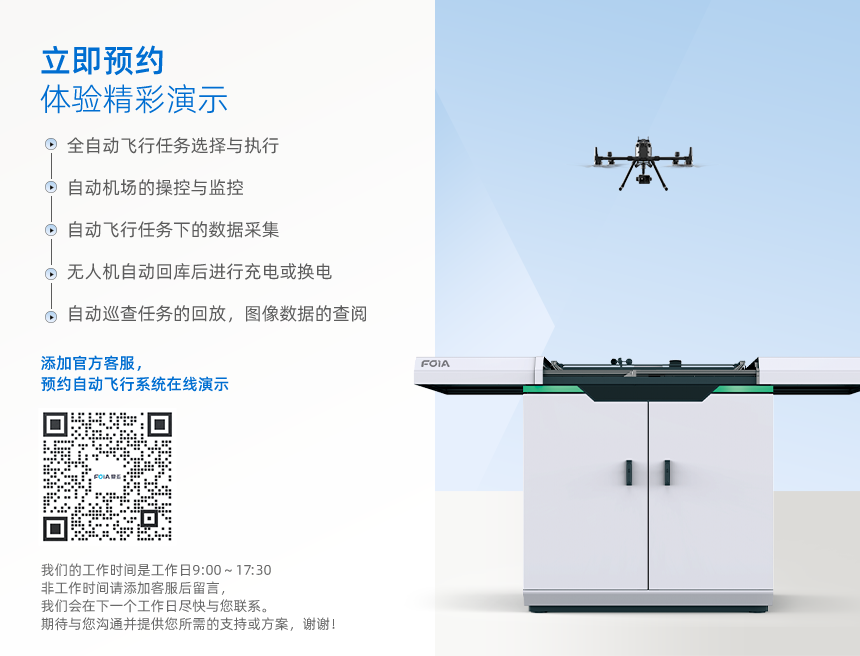
免费预约演示
 全自动飞行任务选择与执行
自动机场的操控与监控
自动飞行任务下的数据采集
无人机自动回库后进行充电或换电
自动巡查任务的回放,图像数据的查阅
全自动飞行任务选择与执行
自动机场的操控与监控
自动飞行任务下的数据采集
无人机自动回库后进行充电或换电
自动巡查任务的回放,图像数据的查阅
添加官方客服

我们的工作时间是工作日9:00~17:30
期待与您沟通并提供您所需的支持或方案,谢谢!
 行业方案与产品报价
相关场景案例资料
复亚自动飞行系统功能
灵活的商务合作模式
行业方案与产品报价
相关场景案例资料
复亚自动飞行系统功能
灵活的商务合作模式
行业方案与产品报价
相关场景案例资料
复亚自动飞行系统功能
灵活的商务合作模式
行业方案与产品报价
相关场景案例资料
复亚自动飞行系统功能
灵活的商务合作模式

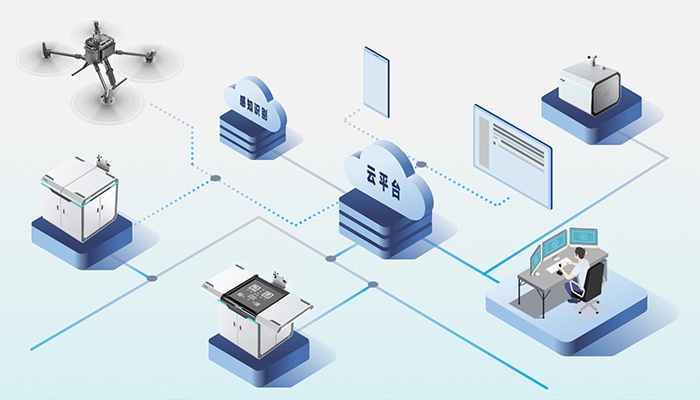
复亚智能是业内领先的无人机全自动飞行系统研发和服务商,用高度智能的自动飞行系统满足政企用户低空巡查业务需求,分布式部署的无人机机场,让巡逻干预随时可达,巡检数据触手可及。
销售邮箱:sales@foiadrone.com
投资邮箱:invest@foiadrone.com
媒体合作:BD@foiadrone.com



微信客服
周一至周五:9:00-17:30

扫码关注